In this example, the scattering of an incoming plane wave between two bodies is simulated as depicted in the following figure:
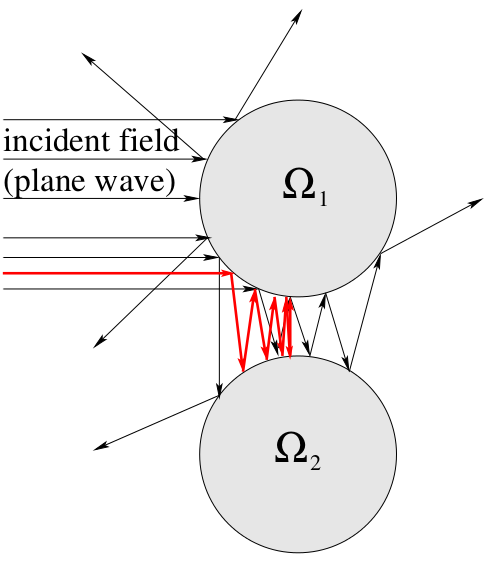 |
| Scattering of an incoming plane wave |
The mathematical formulation leads to an integral equation based on the Helmholtz kernel. Solving such an equation involves the discrete representation of the analytic operators and, if neccessary, the computation of a preconditioner. Both shall be performed using the H-matrix technique.
Problem Description
Let \(\Omega_i \in R^3, i = 1, \ldots, r\) be convex sets with smooth boundaries \(\Gamma_i = \partial \Omega_i\). Furthermore, let \(\nu = \nu_1, \nu_2, \ldots\) with \(1 \le \nu_i \le r\) be a sequence, such that \(\nu_i \ne \nu_{i+1}\) for all \(i\).
To compute: densities \(\eta_{\nu_i}\) on \(\Gamma_{\nu_i}\) defined by
\[ \eta_{\nu_i} - \mathcal{K}_{\nu_i} \eta_{\nu_i} = g_{\nu_i}, \]
with
\[ (\mathcal{K}_{\nu_i} \eta_{\nu_i})(x) := \int_{\Gamma_{\nu_i}} \frac{\partial G(x,y)}{\partial n(x)} \eta_{\nu_i}(y) dy, \quad x \in \Gamma_{\nu_i} \]
with \(G(x,y) = -\frac{1}{2\pi} \frac{e^{ik|x-y|}}{|x-y|}\), \(k > 0\) and with \(d \in R^3,\; |d| = 1,\)
\begin{eqnarray*} g_{\nu_i}(x) := \left\{ \begin{array}{ll} 2 \frac{\partial e^{ik \langle d,x \rangle }}{\partial n(x)}, & i = 1 \\ (\mathcal{K}_{\nu_{i-1}} \eta_{\nu_{i-1}})(x), \; x \in \Gamma_{\nu_i} & i > 1 \end{array} \right. \end{eqnarray*}
With a standard Galerkin discretisation using constant ansatz functions, one obtains the following matrices
\[ K^{\nu_i,\nu_i}_{ij} := \frac{1}{2\pi} \int_{\Gamma_{\nu_i}} \int_{\Gamma_{\nu_i}} e^{ik| x - y|} \frac{1-ik|x-y|}{|x-y|^3} \langle x-y, n( x ) \rangle dy dx \]
and
\[ K^{{\nu_i},{\nu_{i-1}}}_{ij} := \frac{1}{2\pi} \int_{\Gamma_{\nu_i}} \int_{\Gamma_{\nu_{i-1}}} e^{ik| x - y|} \frac{1-ik|x-y|}{|x-y|^3} \langle x-y, n( x ) \rangle dy dx \]
This leads to the following algorithm, which iterates between the surfaces \(v_i\):
- build \(K^{1,1}, K^{2,2}, K^{2,1}\) and \(K^{1,2}\);
- build initial right hand side \(b_{1,1} := g_1\);
- for \(i = 1,\cdots\)
- solve \((I - K^{1,1}) \eta_{i,1} = b_{i,1}\);
- if \(\eta_{i,1} / \eta_{i-1,1}\) converged stop
- \(b_{i,2} := K^{2,1} \eta_{i,1}\);
- solve \((I - K^{2,2}) \eta_{i,2} = b_{i,2}\);
- \(b_{i+1,1} := K^{1,2} \eta_{i,2}\);
Grid Definition
After the standard initialisation, which also imports the 𝖧𝖫𝖨𝖡𝗉𝗋𝗈 types for real and complex values,
#include <iostream>
#include <hlib.hh>
using namespace HLIB;
using namespace std;
using real_t = HLIB::real;
using complex_t = HLIB::complex;
int main ( int argc, char ** argv )
{
try
{
INIT();
the program begins with the definition of the grid for the surfaces \(\Gamma_1\) and \(\Gamma_2\). For this, the internal grid generation of 𝖧𝖫𝖨𝖡𝗉𝗋𝗈 is used to construct a spherical grid with radius 1 centered at \((0,0,0)\):
auto grid1 = make_grid( "sphere-5" );
grid1->scale( T3Point( 4, 4, 1 ) );
Here, "sphere-5" specifies the grid sphere with 5 refinement levels. The second command is optional. It deforms the sphere into a disc, which extends the scattering process.
Usually, a grid in 𝖧𝖫𝖨𝖡𝗉𝗋𝗈 will only define triangle normals. Since this leads to constant normal directions per triangle, the approximation of the Helmholtz DLP kernel is less accurate and may even lead to false results (think of scattering between parallel planes). Therefore, the grid file should contain vertex normals, which are used to interpolate normal directions for each point on the triangle, leading to a continuous normal direction on the surface.
If vertex normals are missing, the can be trivially added under the above assumptions since each vertex coordinate equals the corresponding normal direction. You may use add_vtx_normal of TGrid for this.
Since we need two surfaces, the process is repeated, but in addition, the second disc is shifted with respect to the z direction, such that both disc will have a positive distance:
auto grid2 = make_grid( "sphere-5" );
grid2->scale( T3Point( 4, 4, 1 ) );
grid2->translate( T3Point( 0, 0, 2.5 ) );
This leads to the following configuration:
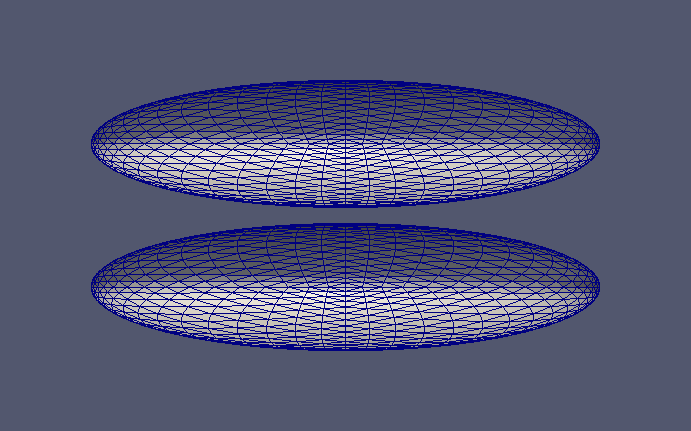 |
| Grid with two discs |
The construction of the grid ends with the definition of the corresponding function spaces. Here, we restrict ourselves to piecewise constant ansatz:
TConstFnSpace fnspace1( grid1.get() );
TConstFnSpace fnspace2( grid2.get() );
Matrix Construction
We need to construct the matrices \(K^{1,1}, K^{2,2}, K^{2,1}\) and \(K^{1,2}\). Due to definition of the grid, the matrices \(K^{1,1}\) and \(K^{2,2}\) are identical.
For the remaining matrices, cluster trees and block cluster trees are needed:
auto coord1 = fnspace1.build_coord();
auto coord2 = fnspace2.build_coord();
TAutoBSPPartStrat part_strat;
TBSPCTBuilder ct_builder( & part_strat );
auto ct1 = ct_builder.build( coord1.get() );
auto ct2 = ct_builder.build( coord2.get() );
TStdGeomAdmCond adm_cond( 2.0 );
TBCBuilder bct_builder;
auto bct11 = bct_builder.build( ct1.get(), ct1.get(), & adm_cond );
auto bct12 = bct_builder.build( ct1.get(), ct2.get(), & adm_cond );
auto bct21 = bct_builder.build( ct2.get(), ct1.get(), & adm_cond );
First, the matrix \(K^{1,1}\) shall be constructed. 𝖧𝖫𝖨𝖡𝗉𝗋𝗈 provides the class TAcousticScatterBF, which implements the kernel for \(G(x,y)\). Not defined so far is the wavenumber \(\kappa\), which should have a value of 6. Furthermore, ACA+ is used to compute low-rank approximations with a fixed block-wise accuracy of \(10^{-4}\).
using bf = TAcousticScatterBF< TConstFnSpace, TConstFnSpace >;
complex_t kappa( 4, 0 );
TTruncAcc acc = fixed_prec( 1e-4 );
unique_ptr< TMatrix > K11;
{
bf_t bf( kappa, & fnspace1, & fnspace1 );
TBFCoeffFn< bf_t > bf_coeff_fn( & bf );
TPermCoeffFn< complex_t > coeff_fn( & bf_coeff_fn, bct11->row_ct()->perm_i2e(), bct11->col_ct()->perm_i2e() );
TACAPlus< complex_t > lrapx( & coeff_fn );
TDenseMBuilder< complex_t > h_builder( & coeff_fn, & lrapx );
K11 = unique_ptr< TMatrix >( h_builder.build( bct11.get(), acc ) );
}
The actual operator in the above equation is \(I - K^{1,1}\). Here \(I\) is not the identity, but the mass matrix, as defined by the identity kernel:
using massbf_t = TMassBF< TConstFnSpace, TConstFnSpace >;
{
massbf_t bf( & fnspace1, & fnspace1 );
TBFCoeffFn< massbf_t > mass_coeff_fn( & bf );
TPermCoeffFn< real_t > coeff_fn( & mass_coeff_fn, bct11->row_ct()->perm_i2e(), bct11->col_ct()->perm_i2e() );
TACAPlus< real_t > lrapx( & coeff_fn );
TDenseMBuilder< real_t > h_builder( & coeff_fn, & lrapx );
M11 = unique_ptr< TMatrix >( h_builder.build( bct11.get(), acc ) );
M11->set_complex( true );
}
Finally, \(K^{1,1}\) is updated with the mass matrix:
add( 1.0, M11.get(), -1.0, K11.get(), acc );
void add(const T_value alpha, const TMatrix *A, const T_value beta, TMatrix *C, const TTruncAcc &acc)
C ≔ α·A + β·C.
The construction of \(K^{1,2}\) and \(K^{2,1}\) is similar to \(K^{1,1}\). Only the function spaces and block cluster trees will change.
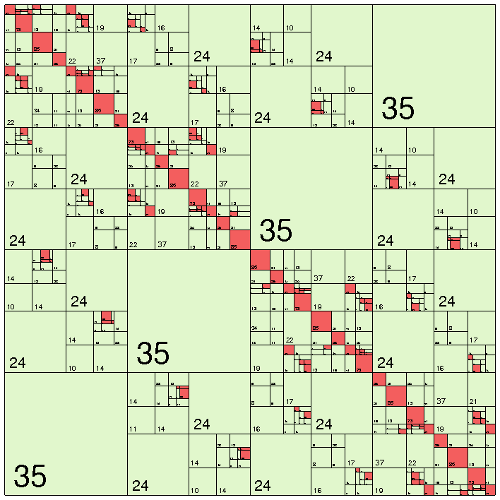 | 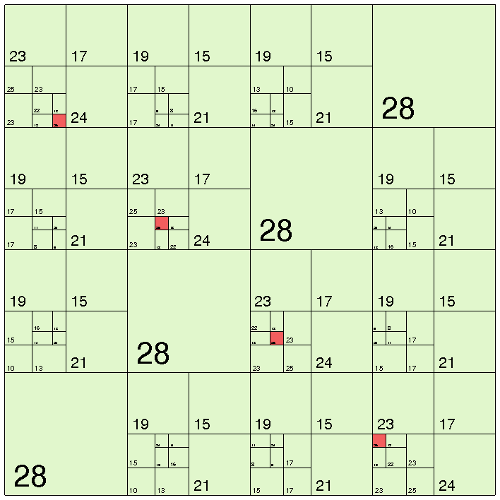 | 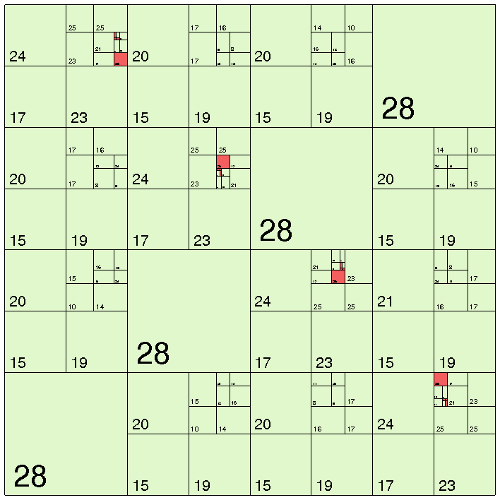 |
| \(K^{1,1}\) | \(K^{1,2}\) | \(K^{2,1}\) |
Please note, that \(K^{1,1}\) is more dense than the other two matrices. This is due to the positive distance between both discs. If this is increased (or if coarsening is applied), \(K^{1,2}\) and \(K^{2,1}\) may be represented by a single low-rank matrix.
Right-Hand Side
The initial right-hand side is defined by \(g_{\nu_i}\) above, where also the the incident field \(d\) is used:
\[ g_{\nu_i}(x) = 2 \frac{\partial e^{ik \langle d,x \rangle }}{\partial n(x)} \]
Under the above setting, this is equal to:
\[ g_{\nu_i}(x) = 2 i \kappa e^{ ik \langle d,x \rangle } \langle d, n \rangle \]
and is implemented in the following RHS function:
class TAcousticRHS : public TBEMFunction< complex_t >
{
private:
const T3Point _inc_dir;
const complex_t _ikappa;
public:
TAcousticRHS ( const T3Point & inc_dir,
const complex_t kappa )
: _inc_dir( inc_dir )
, _ikappa( complex_t( 0, 1 ) * kappa )
{}
virtual complex_t
eval (
const T3Point & pos,
const T3Point & normal ) const
{
return real_t(2) * _ikappa * exp( _ikappa *
dot( _inc_dir, pos ) ) *
dot( _inc_dir, normal );
}
};
void eval(const TMatrix *A, TVector *v, const matop_t op, const eval_option_t &options)
evaluate L·U·x=y with lower triangular L and upper triangular U
std::enable_if_t< is_vector< T1 >::value &&is_vector< T2 >::value &&is_same_type< typename T1::value_t, typename T2::value_t >::value, typename T1::value_t > dot(const T1 &x, const T2 &y)
compute <x,y> = x^H · y
Definition: Algebra.hh:279
We use TQuadBEMRHS to compute the corresponding vector of the RHS using quadrature and afterwards reorder it for H-arithmetic:
TAcousticRHS rhsfn( T3Point( 1, 1, 0 ), kappa );
TQuadBEMRHS< TConstFnSpace, complex_t >
rhs_build( 4 );
auto rhs = rhs_build.build( & fnspace1, & rhsfn );
ct1->perm_e2i()->permute( rhs.get() );
The plane wave \(d\) is chosen to be \((1,1,0)\).
Acoustic Scattering Iteration
The scattering iteration involves to solves with \(K^{1,1}\) ( \(=K^{2,2}\)). This is accelerated using a preconditioner computed by and H-LU factorisation:
auto K11_copy = K11->copy();
std::unique_ptr< TFacInvMatrix > factorise_inv(TMatrix *A, const TTruncAcc &acc, const fac_options_t &options=fac_options_t())
compute factorisation of A and return inverse operator
We also need a vector to hold the current and the last approximation of the solution:
auto x = K11->col_vector();
auto x_old = K11->col_vector();
real_t old_ratio = real_t(1);
The variable old_ratio is needed to check convergence.
The iteration begins with solving \((I - K^{1,1}) \eta_{i,1} = b_{i,1}\), where \(b\) is the vector of the RHS:
for ( int it = 0; it < 100; ++it )
{
solve( K11.get(), x.get(), rhs.get(), K11_pre.get() );
std::enable_if_t< is_matrix< T1 >::value &&is_vector< T2 >::value &&is_same_type< typename T1::value_t, typename T2::value_t >::value, void > solve(T1 &A, T2 &b)
solve A·x = b with known A and b; x overwrites b (A is overwritten upon exit!)
Definition: Algebra.hh:990
Convergence is tested, if the ratio between the previous solution and the current solution is below some threshold. For this ratio is tested entry-wise, e.g. \(\eta_{i,1}^j / \eta_{i-1,1}^j\) for each \(j\). This is implemented in the function compare:
real_t
compare ( const TVector * x,
const TVector * x_old )
{
real_t vmax = 0.0;
size_t n = x->size();
for ( idx_t j = 0; j < idx_t(n); ++j )
{
const complex_t v = x->centry( j );
const complex_t v_old = x_old->centry( j );
vmax = std::max( vmax, abs( v / v_old ) );
}
return vmax;
}
If this ratio does no longer change, the iteration is stopped. The threshold in this example is \(10^{-4}\):
if ( it > 0 )
{
const real_t ratio = compare( x.get(), x_old.get() );
const real_t diff = ( it > 1 ? std::abs( ratio - old_ratio ) / std::abs( old_ratio ) : 1.0 );
old_ratio = ratio;
if ( diff < 1e-4 )
break;
}
In addition to this, the iteration shall stop if the solution \(\eta_{i,1}\) vanishes:
const real_t normx = x->norm2();
if ( x->norm2() < 1e-20 )
break;
Otherwise, the iteration continues with the scaling of the solution vector and the computation of the RHS for \(K^{2,2}\):
x->scale( real_t(1) / normx );
x_old->assign( real_t(1), x.get() );
mul_vec( real_t(-1), K12.get(), x.get(), real_t(0), rhs.get(), apply_normal );
void mul_vec(const TProcSet &ps, const real alpha, const TMatrix *A, const TVector *x, const real beta, TVector *y, const matop_t op)
compute y ≔ α·A·x + β·y on (possibly) distributed matrix A on all processors in ps
Solving with \(K^{2,2}\) ( \(=K^{1,1}\)) and computing the RHS for the next iteration finished the loop and the program:
solve( K11.get(), x.get(), rhs.get(), K11_pre.get(), & solve_info );
mul_vec( real_t(-1), K21.get(), x.get(), real_t(0), rhs.get(), apply_normal );
}
DONE();
}
catch ( Error & e )
{
cout << e.to_string() << endl;
}
return 0;
}
Running the simulation will produce the following output for \(\eta_{i,1}\) and \(\eta_{i,2}\). Here, the entry-wise absolute values of the complex valued solution vectors are used for the visualisation (reload page to restart animation):
 |  |  |
| \(\eta_{i,1}\) | \(\eta_{i,2}\) | |
The Plain Program
#include <iostream>
#include <hlib.hh>
using namespace HLIB;
using namespace std;
using real_t = HLIB::real;
using copmplex_t = HLIB::complex;
class TAcousticRHS : public TBEMFunction< complex_t >
{
private:
const T3Point _inc_dir;
const complex_t _ikappa;
public:
TAcousticRHS ( const T3Point & inc_dir,
const complex_t kappa )
: _inc_dir( inc_dir )
, _ikappa( complex_t( 0, 1 ) * kappa )
{}
virtual complex_t
eval (
const T3Point & pos,
const T3Point & normal ) const
{
return real_t(2) * _ikappa * exp( _ikappa *
dot( _inc_dir, pos ) ) *
dot( _inc_dir, normal );
}
};
real_t
compare ( const TVector * x,
const TVector * x_old )
{
real_t vmax = 0.0;
size_t n = x->size();
for ( idx_t j = 0; j < idx_t(n); ++j )
{
const complex_t v = x->centry( j );
const complex_t v_old = x_old->centry( j );
vmax = std::max( vmax, abs( v / v_old ) );
}
return vmax;
}
int main ( int argc, char ** argv )
{
try
{
INIT();
grid1->scale( T3Point( 4, 4, 1 ) );
grid2->scale( T3Point( 4, 4, 1 ) );
grid2->translate( T3Point( 0, 0, 2.5 ) );
TConstFnSpace fnspace1( grid1.get() );
TConstFnSpace fnspace2( grid2.get() );
auto coord1 = fnspace1.build_coord();
auto coord2 = fnspace2.build_coord();
TAutoBSPPartStrat part_strat;
TBSPCTBuilder ct_builder( & part_strat );
auto ct1 = ct_builder.build( coord1.get() );
auto ct2 = ct_builder.build( coord2.get() );
TStdGeomAdmCond adm_cond( 2.0 );
TBCBuilder bct_builder;
auto bct11 = bct_builder.build( ct1.get(), ct1.get(), & adm_cond );
auto bct12 = bct_builder.build( ct1.get(), ct2.get(), & adm_cond );
auto bct21 = bct_builder.build( ct2.get(), ct1.get(), & adm_cond );
using bf_t = TAcousticScatterBF< TConstFnSpace, TConstFnSpace >;
complex_t kappa( 6, 0 );
TTruncAcc acc = fixed_prec( 1e-4 );
unique_ptr< TMatrix > K11;
{
bf_t bf( kappa, & fnspace1, & fnspace1 );
TBFCoeffFn< bf_t > bf_coeff_fn( & bf );
TPermCoeffFn< complex_t > coeff_fn( & bf_coeff_fn, bct11->row_ct()->perm_i2e(), bct11->col_ct()->perm_i2e() );
TACAPlus< complex_t > lrapx( & coeff_fn );
TDenseMBuilder< complex_t > h_builder( & coeff_fn, & lrapx );
K11 = h_builder.build( bct11.get(), acc );
}
using massbf_t = TMassBF< TConstFnSpace, TConstFnSpace >;
unique_ptr< TMatrix > M11;
{
massbf_t bf( & fnspace1, & fnspace1 );
TBFCoeffFn< massbf_t > mass_coeff_fn( & bf );
TPermCoeffFn< real_t > coeff_fn( & mass_coeff_fn, bct11->row_ct()->perm_i2e(), bct11->col_ct()->perm_i2e() );
TACAPlus< real_t > lrapx( & coeff_fn );
TDenseMBuilder< real_t > h_builder( & coeff_fn, & lrapx );
M11 = h_builder.build( bct11.get(), acc );
M11->set_complex( true );
}
add( 1.0, M11.get(), -1.0, K11.get(), acc );
unique_ptr< TMatrix > K12;
{
bf_t bf( kappa, & fnspace1, & fnspace2 );
TBFCoeffFn< bf_t > bf_coeff_fn( & bf );
TPermCoeffFn< complex_t > coeff_fn( & bf_coeff_fn, bct12->row_ct()->perm_i2e(), bct12->col_ct()->perm_i2e() );
TACAPlus< complex_t > lrapx( & coeff_fn );
TDenseMBuilder< complex_t > h_builder( & coeff_fn, & lrapx );
K12 = h_builder.build( bct12.get(), acc );
}
unique_ptr< TMatrix > K21;
{
bf_t bf( kappa, & fnspace2, & fnspace1 );
TBFCoeffFn< bf_t > bf_coeff_fn( & bf );
TPermCoeffFn< complex_t > coeff_fn( & bf_coeff_fn, bct21->row_ct()->perm_i2e(), bct21->col_ct()->perm_i2e() );
TACAPlus< complex_t > lrapx( & coeff_fn );
TDenseMBuilder< complex_t > h_builder( & coeff_fn, & lrapx );
K21 = h_builder.build( bct21.get(), acc );
}
TAcousticRHS rhsfn( T3Point( 1, 1, 0 ), kappa );
TQuadBEMRHS< TConstFnSpace, complex_t >
rhs_build( 4 );
auto rhs = rhs_build.build( & fnspace1, & rhsfn );
ct1->perm_e2i()->permute( rhs.get() );
auto K11_copy = K11->copy();
auto x = K11->col_vector();
auto x_old = K11->col_vector();
real_t old_ratio = real_t(1);
for ( int it = 0; it < 100; ++it )
{
solve( K11.get(), x.get(), rhs.get(), K11_pre.get() );
if ( it > 0 )
{
const real_t ratio = compare( x.get(), x_old.get() );
const real_t diff = ( it > 1 ? std::abs( ratio - old_ratio ) / std::abs( old_ratio ) : 1.0 );
old_ratio = ratio;
if ( diff < 1e-4 )
break;
}
const real_t normx = x->norm2();
if ( x->norm2() < 1e-20 )
break;
x->scale( real_t(1) / normx );
x_old->assign( real_t(1), x.get() );
mul_vec( real_t(-1), K12.get(), x.get(), real_t(0), rhs.get(), apply_normal );
solve( K11.get(), x.get(), rhs.get(), K11_pre.get() );
mul_vec( real_t(-1), K21.get(), x.get(), real_t(0), rhs.get(), apply_normal );
}
DONE();
}
catch ( Error & e )
{
cout << e.to_string() << endl;
}
return 0;
}
std::unique_ptr< TGrid > read_grid(const std::string &filename)
Read grid from file with automatic file format detection.